

Views:0 Pengarang:Editor tapak Masa Terbitkan: 2025-05-21 Asal:Tapak








Baru -baru ini, persidangan global ICRA 2025 dalam bidang robotik dan automasi dibuka di Atlanta, Amerika Syarikat. Kaedah 'meningkatkan anggaran niat manusia dan peruntukan peranan untuk kerjasama robot manusia fizikal ' yang dicadangkan secara bersama oleh Institut Automasi Akademi Sains Cina dan Lingbao Casbot diterima oleh ICRA 2025.
01. DTRT: Meningkatkan Anggaran Niat Manusia dan Peruntukan Peranan Mesin Manusia dalam Kerjasama Mesin Manusia Fizikal
Anggaran niat manusia yang tepat dan peruntukan peranan manusia yang munasabah adalah penting untuk kerjasama yang selamat dan cekap dalam kerjasama robot manusia fizikal (PHRC). Kaedah sedia ada yang bergantung kepada data gerakan jangka pendek untuk anggaran niat kekurangan keupayaan ramalan pelbagai langkah, yang menghalang keupayaan robot untuk melihat perubahan niat jangka panjang dan secara autonomi menyesuaikan peruntukan mesin manusia, yang membawa kepada potensi penyelewengan mesin manusia. Untuk menyelesaikan masalah ini, Institut Automasi Akademi Sains Cina dan Lingbao Casbot bersama -sama mencadangkan rangka kerja Robot Tracker (DTRT) yang berpusat di China. Rangka kerja ini mengamalkan struktur hierarki, dan menggunakan gerakan berpandu manusia dan memaksa data untuk menangkap perubahan niat manusia dengan cepat, untuk mencapai ramalan trajektori yang tepat dan pelarasan tingkah laku robot yang dinamik, dan akhirnya mencapai kerjasama fizikal manusia yang berkesan.
Tracker Robot Berdasarkan Transformer Dual untuk Anggaran Niat Manusia dan Tugasan Peranan
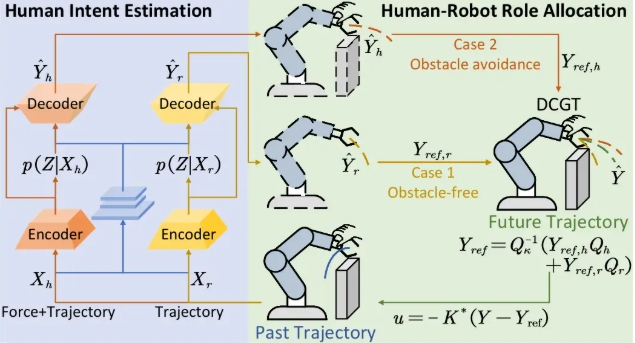
Khususnya, anggaran niat manusia dalam DTRT menggunakan dua autoencoder variasi bersyarat berasaskan transformer (CVAE) untuk menggabungkan data gerakan robot dalam situasi bebas halangan dengan trajektori dan kuasa berpandu manusia semasa penghindaran halangan. Di samping itu, kami menggunakan Teori Permainan Koperasi Berbeza (DCGT) berdasarkan kekuatan manusia yang digunakan untuk mengintegrasikan kedua -dua ramalan, memastikan tingkah laku robot adalah konsisten dengan niat manusia. Berbanding dengan kaedah yang sedia ada, DTRT menggabungkan dinamik manusia ke dalam ramalan jangka panjang, memberikan pemahaman niat yang tepat, mencapai peruntukan peranan yang munasabah, dan meningkatkan autonomi dan operasi robot.
02. Kerjasama mesin manusia fizikal menghadapi cabaran dua ramalan niat dan peruntukan peranan
Kerjasama manusia-mesin fizikal (PHRC) adalah penting dalam pembuatan, penjagaan kesihatan, dan perkhidmatan. Strategi yang berkesan diperlukan untuk memastikan bahawa robot dapat bekerjasama dengan manusia dengan lancar, menganggarkan niat tepat, dan menyesuaikan tingkah laku secara dinamik untuk membantu manusia. Oleh itu, anggaran niat manusia yang tepat dan peruntukan peranan mesin manusia yang munasabah adalah cabaran utama dalam meningkatkan prestasi PHRC.
Ramalan yang tepat mengenai trajektori masa depan berdasarkan niat manusia adalah penting untuk keberkesanan bantuan robot dan keselamatan PHRC. Dalam persekitaran yang kompleks dengan bahaya yang berpotensi, seperti ketika robot menghadapi halangan yang tidak diketahui, perubahan pesat dalam niat manusia menimbulkan cabaran yang signifikan terhadap anggaran niat. Kaedah semasa terutamanya bergantung kepada data gerakan jangka pendek, seperti kedudukan dan halaju, yang mengehadkan pengesanan perubahan niat manusia dan akan mempengaruhi ketepatan dan keselamatan ramalan.
Di samping itu, data jangka pendek dapat mengurangkan keberkesanan anggaran niat dalam kerjasama jangka panjang. Oleh itu, meneliti kaedah ramalan jangka panjang yang mengintegrasikan daya yang digunakan manusia ke dalam PHRC adalah penting untuk mencapai anggaran niat yang tepat. Di samping itu, peruntukan peranan manusia melibatkan mekanisme yang kompleks untuk memberikan kawalan tugas antara manusia dan robot. Proses ini akan menyelaraskan hubungan manusia-mesin dalam masa nyata, mengurangkan perselisihan, dan meningkatkan tahap bantuan robot. Kaedah yang sedia ada terutamanya bergantung kepada kawalan impedans/pematuhan, dan menentukan peranan dengan mengubahsuai parameter model. Di antara pelbagai kaedah, peruntukan peranan berdasarkan teori permainan mensimulasikan proses kolaboratif di kalangan pelbagai peserta, dengan matlamat meminimumkan fungsi kos untuk mencapai kerjasama mesin manusia yang optimum. Walau bagaimanapun, memastikan tingkah laku robot selaras dengan niat manusia sambil mengekalkan autonomi dan fleksibiliti tetap menjadi cabaran utama.
03. DTRT mempamerkan kelebihan yang ketara dalam ketepatan ramalan dan prestasi kolaboratif
Hasil eksperimen menunjukkan bahawa DTRT mempunyai kelebihan yang signifikan dalam ketepatan ramalan, mempamerkan prestasi yang sangat baik dalam pelbagai petunjuk kerjasama manusia mesin fizikal, dengan berkesan mengurangkan perbezaan manusia mesin dan meningkatkan tahap bantuan robot, dengan potensi besar untuk permohonan. Kelebihan teras DTRT terletak pada tiga mata berikut:
DTRT menggabungkan anggaran niat manusia dengan peruntukan peranan manusia untuk mengesan perubahan niat dan mengurangkan perbezaan manusia mesin, dengan berkesan meningkatkan prestasi kerjasama mesin manusia dalam persekitaran yang kompleks dan berbahaya.
2. Struktur hierarki berdasarkan anggaran niat manusia dalam DTRT secara serentak memproses data gerakan dan memaksa dalam kerjasama manusia-mesin, meningkatkan ketepatan ramalan niat manusia dan memberikan pemahaman yang tepat tentang niat.
3. Peruntukan peranan manusia berdasarkan teori permainan koperasi yang berbeza menyedari pemimpin pemimpin adaptif berdasarkan daya yang dikenakan oleh manusia, memastikan tingkah laku robot selaras dengan niat manusia dan mengurangkan perbezaannya sambil mengekalkan autonomi robot.
Dari segi prestasi kerjasama mesin manusia fizikal, petunjuk berikut digunakan:
Dalam eksperimen, kami menggantikan dan rintangan secara rawak. Hasilnya menunjukkan bahawa DTRT mengatasi kaedah sedia ada dalam senario kerjasama mesin manusia fizikal. Purata sudut kerjasama manusia-mesin DTRT ialah 76.4 °, indeks tahap bantuan robot purata adalah 1.5, dan sistem mesin manusia berada dalam keadaan kolaboratif 61.8% dari masa itu. Di samping itu, peruntukan peranan mesin manusia secara berkesan mengimbangi autonomi robot dan bimbingan manusia, yang mengakibatkan hanya 3.5 j kerja mekanikal manusia. Secara keseluruhannya, DTRT secara tepat menganggarkan perubahan dalam niat manusia, secara munasabah memperuntukkan peranan pemimpin dan pengikut, dengan itu mengurangkan perbezaan mesin manusia, meningkatkan tahap bantuan robot, dan mempromosikan kerjasama mesin manusia fizikal yang selamat dan cekap.
Perbandingan kuantitatif antara DTRT dan kaedah sedia ada dari segi petunjuk
Cadangan DTRT bukan sahaja merupakan kejayaan algoritma, tetapi juga percubaan untuk membina semula 'Hubungan Manusia-mesin ': Ia menyediakan laluan teknikal untuk pembangunan robot humanoid yang menggabungkan universiti dan nilai kejuruteraan. Pada masa akan datang, idea -idea penyelidikan dan mekanisme teras DTRT dijangka terus berkembang dan memperdalam dalam pelbagai senario aplikasi praktikal yang difokuskan oleh Lingbao Casbot, seperti pembuatan industri, operasi kompleks, dan kerjasama perkhidmatan.

















